Project Overview
During the 2022-2023 PowerPlay Season, our team designed a robot focused on speed and scoring accuracy. I served as the Lead Software Engineer, designing and implementing the autonomous control systems and computer vision using OpenCV.
Autonomous
Our robot utilizes various of sensors for high-precision movement: three "dead-wheels" (free-spinning encoders) for position tracking, a camera for alignment, and a Color Sensor to monitor cone intake. Additionally, distance and light sensors ensure the claw has a secure grip before moving.
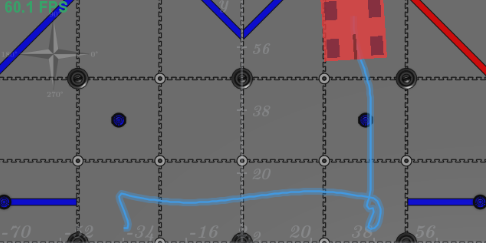
This is what our full autonomous path looks like:
Here is our robot in action. Fun fact: we were the 2nd team in the world capable of scoring full sets of cones from both the left and right sides within the 30-second autonomous period!
Human Control
The TeleOp period lasts 2 minutes and 30 seconds, with two drivers: one for chassis movement and one for the scoring mechanisms.
My primary goal was to leverage our sensors to make the robot adapt to the driver, rather than the driver adapting to the robot. This allowed our team to focus entirely on strategy. Key automations included:
- Smart Intake: Using Color and Distance sensors to detect cones and automatically trigger the claw.
- Auto-Transfer: Seamlessly passing the cone from the intake to the scoring arm.
- Preset Heights: Using motor encoders for instant, precise scoring at various junction heights.
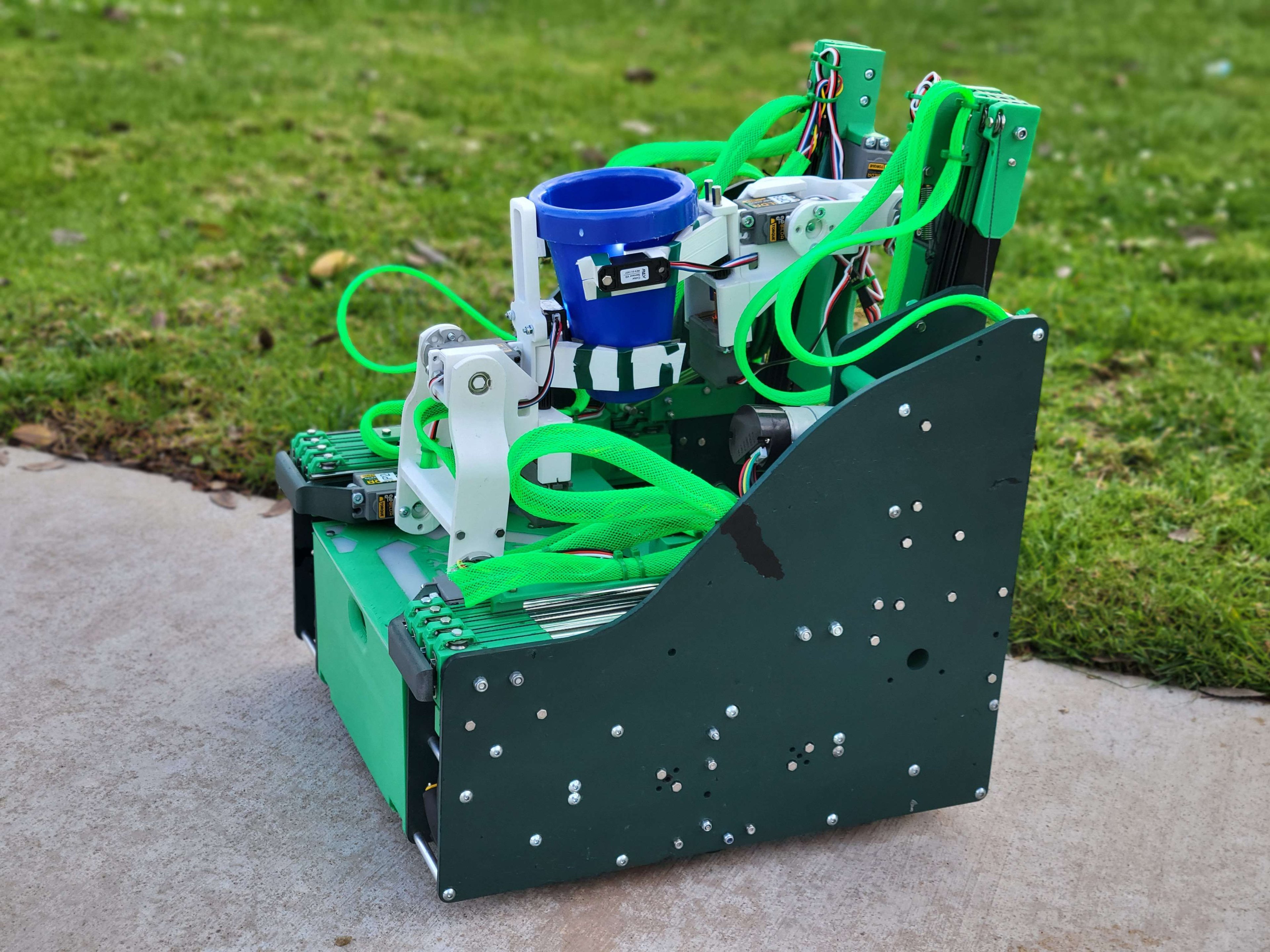
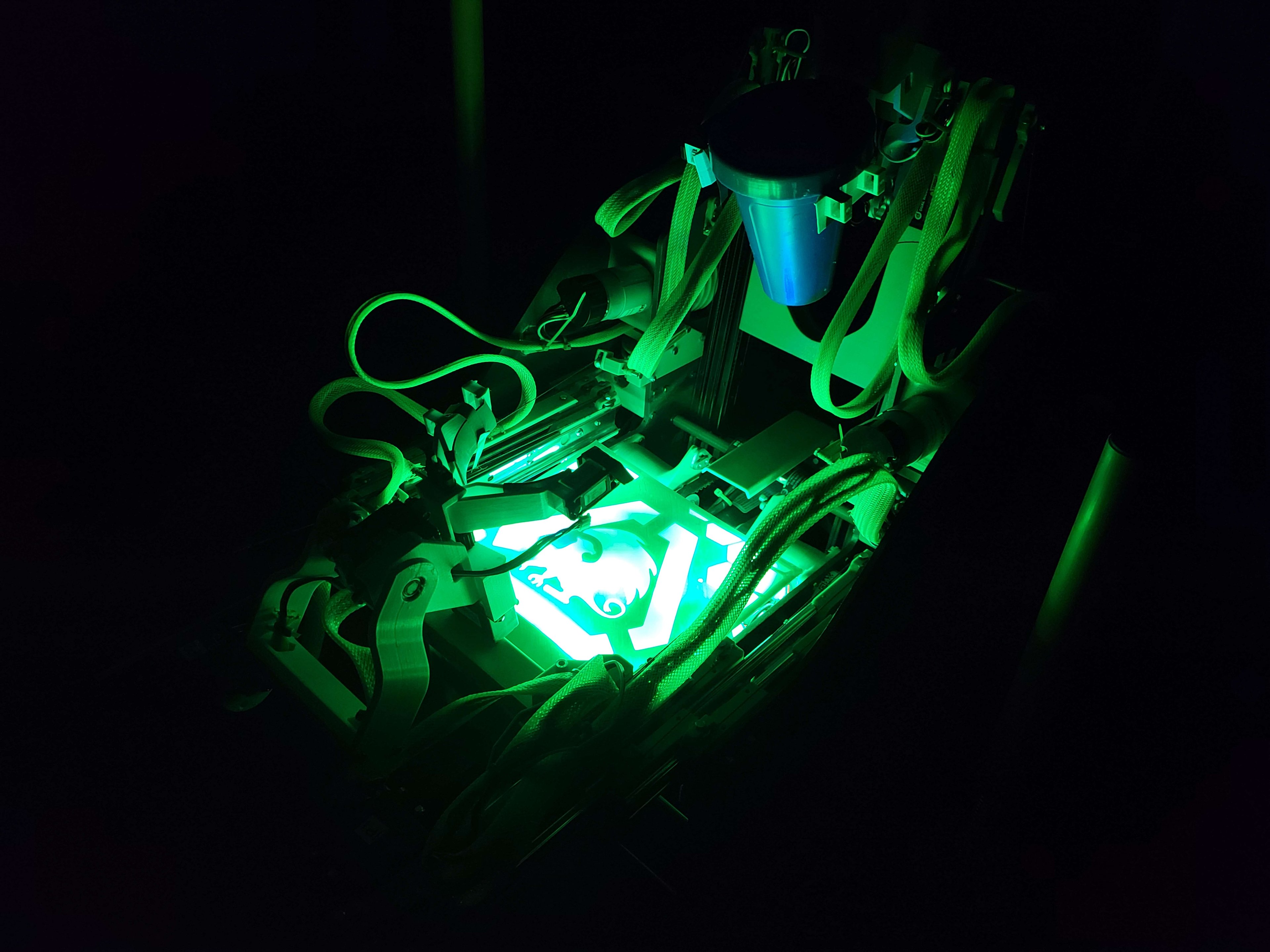
Gallery
Check out some photos of our robot pictures:

Result
Our software consistency led to a highly successful season, We were honored to receive these awards:
- Think Award: 1st Place
- Inspire Award: 2nd Place
- Innovate Award: 2nd Place
- Control Award: 2nd Place